
MobRoboLibraryの解説
Android用MobRoboライブラリファイル「libroboctrlf.so」を使用するにはプロジェクトの指定フォルダ下(libs/armeabi/)に置くことで、アプリケーション側から利用できるようになる。(プロジェクトファイルの項を参照)
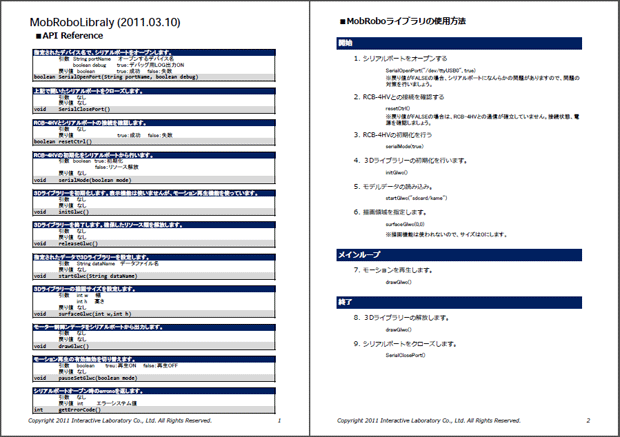
MobRoboLibraryのリファレンス(PDF)
![]()
ロボットのコントロールボードについて
本ライブラリは近藤科学社製のコントロールボードRCB-4HVをシリアルポート経由で制御することができる。近藤科学社より発売されている二足歩行ロボットの最新モデルや、現在発売中の多脚ロボットシリーズに採用されている次世代コントロールボードである。
2010年7月に発売されたアニマルロボット第一弾のカメ型ロボットにはRCB-3HVが使用されていたが、最新モデルを含め今後近藤科学社から発売されるロボットにはRCB- 4HVが採用されるそうだ。同社のサポートページではコントロールボードやサーボモーターに関する詳しい資料やリファレンスも公開されているので、それらを参照しつつ今後新しくラインナップされるロボットのコントロールに本ライブラリを活用して欲しい。
近藤科学 多脚ロボット

カメ型ロボット02(2011年10月発売)
近藤科学 多脚ロボットシリーズサイト
 プログラム解説
プログラム解説