
今回の記事で紹介した目覚ましアプリ「KameRoboAlarm」は、セットした時刻になるとサウンドと共にモーションデータを再生してロボットが動き出す、という仕組みをAndroidアプリ(JAVA)で実装している。右側のリンクから実行ファイルとサンプルデータがダウンロードできるので、記事を参照しながら利用して欲しい。
また、自分でAndroidアプリを作成したい人のために、次ページ以降の解説で目覚ましアプリのプロジェクトファイル概要や一部ソースプログラムの解説、MobRoboライブラリのAPIも説明している。右のリンクからソースファイル(Androidプロジェクト)がダウンロードできるので、アプリの改造や新規作成の参考に役立ててもらえば幸いである。
目覚ましアプリ「カメロボアラーム」の動作
起動すると短針のみの時計が表示される。この時計の針は初め現在時刻を指しているが、マウスのドラッグ操作で回して、現在から12時間後までの任意の時間をセットすることができる。(「CANCEL」ボタンをクリックすると現在時刻に戻る)
針を目覚まし時刻に合わせたら、「SET」ボタンをクリックするとアプリはスリープしてセット完了。
セットされた時刻になると、アプリが再起動して音楽を鳴らし、カメ型ロボットが動きだす。
ダウンロードファイルについて
「ロボコントロール」と「カメロボアラーム」
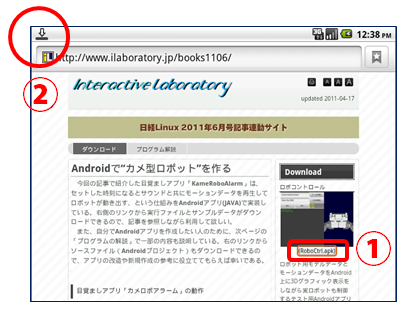
拡張子.apkの実行ファイルはAndroidアプリケーションなので、BeagleBoard(Android)のWebブラウザでこのWebページを開いてAndroid上でインストールを行う。
- apkインストールの手引き
- ①リンクをクリックするとダウンロードが始まる。
- ②画面上端に表示される↓アイコンの点滅が止まればダウンロード完了。
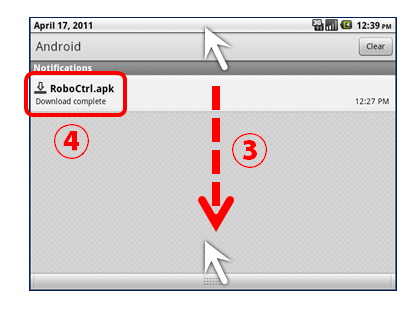
- ③画面上端をマウスで下方向へドラッグするとダウンロードファイルが表示される。
- ④ダウンロードしたapkファイル(ここではRoboCtrl.apk)をクリック。
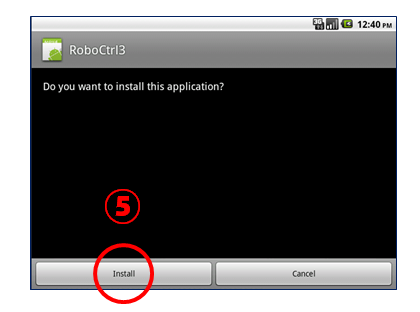
- ⑤「Install」ボタンをクリックするとインストール開始。
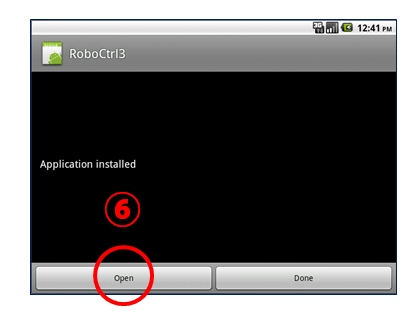
- ⑥インストール終了後にすぐ起動したい時は「Open」をクリックする。(後で起動したいときは「Done」をクリック)
- ※下記の「カメロボ3Dデータ」がSDカードに保存されていないと3Dモデルは表示されないので注意。
「カメロボ3Dデータ」
解凍すると、
1.モデルデータファイル(robdemo.glwm)
2.アニメデータファイル(robdemo.glwa)
3.サーボデータファイル(robdemo.glwc)
の3ファイルに展開される。記事に沿って進めていればBeagleBoardにマウントされたSDカードのルートフォルダに保存されているはずだ。
3Dデータが保存されていれば、インストールされた2つのAndroidアプリを実行するとBeagleBoardのAndroid上で動作が確認できるだろう。



 (RoboCtrl.apk)
(RoboCtrl.apk)